Loading...
Searching...
No Matches
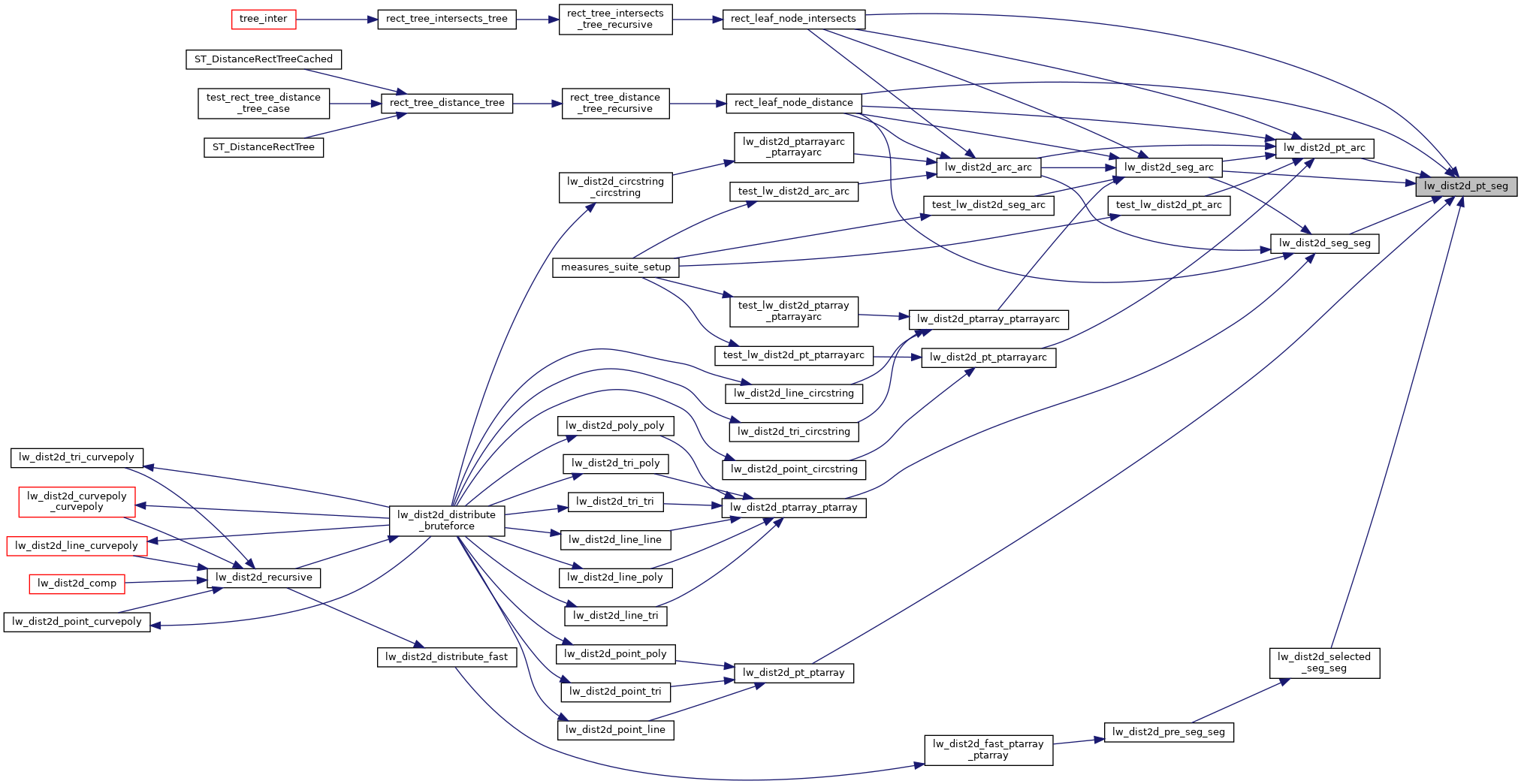
◆ lw_dist2d_pt_seg()
lw_dist2d_comp from p to line A->B This one is now sending every occasion to lw_dist2d_pt_pt Before it was handling occasions where r was between 0 and 1 internally and just returning the distance without identifying the points.
To get this points it was necessary to change and it also showed to be about 10faster.
Definition at line 2305 of file measures.c.
2306{
2307 POINT2D c;
2309 /*if start==end, then use pt distance */
2312
2313 /*
2314 * otherwise, we use comp.graphics.algorithms
2315 * Frequently Asked Questions method
2316 *
2317 * (1) AC dot AB
2318 * r = ---------
2319 * ||AB||^2
2320 * r has the following meaning:
2321 * r=0 P = A
2322 * r=1 P = B
2323 * r<0 P is on the backward extension of AB
2324 * r>1 P is on the forward extension of AB
2325 * 0<r<1 P is interior to AB
2326 */
2327
2330
2331 /*This is for finding the maxdistance.
2332 the maxdistance have to be between two vertexes, compared to mindistance which can be between two vertexes.*/
2334 {
2337 else /* (r < 0.5) */
2339 }
2340
2345
2346 /*If the point p is on the segment this is a more robust way to find out that*/
2347 if ((((A->y - p->y) * (B->x - A->x) == (A->x - p->x) * (B->y - A->y))) && (dl->mode == DIST_MIN))
2348 {
2349 dl->distance = 0.0;
2350 dl->p1 = *p;
2351 dl->p2 = *p;
2352 }
2353
2354 /*If the projection of point p on the segment is between A and B
2355 then we find that "point on segment" and send it to lw_dist2d_pt_pt*/
2358
2360}
int lw_dist2d_pt_pt(const POINT2D *thep1, const POINT2D *thep2, DISTPTS *dl)
Compares incoming points and stores the points closest to each other or most far away from each other...
Definition measures.c:2365
Definition liblwgeom.h:375
References DIST_MAX, DIST_MIN, DISTPTS::distance, lw_dist2d_pt_pt(), DISTPTS::mode, DISTPTS::p1, DISTPTS::p2, r, POINT2D::x, and POINT2D::y.
Referenced by lw_dist2d_pt_arc(), lw_dist2d_pt_ptarray(), lw_dist2d_seg_arc(), lw_dist2d_seg_seg(), lw_dist2d_selected_seg_seg(), rect_leaf_node_distance(), and rect_leaf_node_intersects().
Here is the call graph for this function:

Here is the caller graph for this function: