Loading...
Searching...
No Matches
◆ lw_dist2d_ptarray_ptarrayarc()
| int lw_dist2d_ptarray_ptarrayarc | ( | const POINTARRAY * | pa, |
| const POINTARRAY * | pb, | ||
| DISTPTS * | dl | ||
| ) |
Test each segment of pa against each arc of pb for distance.
Definition at line 1257 of file measures.c.
1258{
1259 uint32_t t, u;
1266
1268
1270 {
1273 }
1274
1276 {
1279 }
1280 else
1281 {
1282 A1 = getPoint2d_cp(pa, 0);
1284 {
1285 A2 = getPoint2d_cp(pa, t);
1286 B1 = getPoint2d_cp(pb, 0);
1288 {
1289 B2 = getPoint2d_cp(pb, u);
1290 B3 = getPoint2d_cp(pb, u + 1);
1291 dl->twisted = twist;
1292
1293 lw_dist2d_seg_arc(A1, A2, B1, B2, B3, dl);
1294
1295 /* If we've found a distance within tolerance, we're done */
1298
1299 B1 = B3;
1300 }
1301 A1 = A2;
1302 }
1303 }
1305}
static const POINT2D * getPoint2d_cp(const POINTARRAY *pa, uint32_t n)
Returns a POINT2D pointer into the POINTARRAY serialized_ptlist, suitable for reading from.
Definition lwinline.h:91
int lw_dist2d_seg_arc(const POINT2D *A1, const POINT2D *A2, const POINT2D *B1, const POINT2D *B2, const POINT2D *B3, DISTPTS *dl)
Calculate the shortest distance between an arc and an edge.
Definition measures.c:1362
Definition liblwgeom.h:375
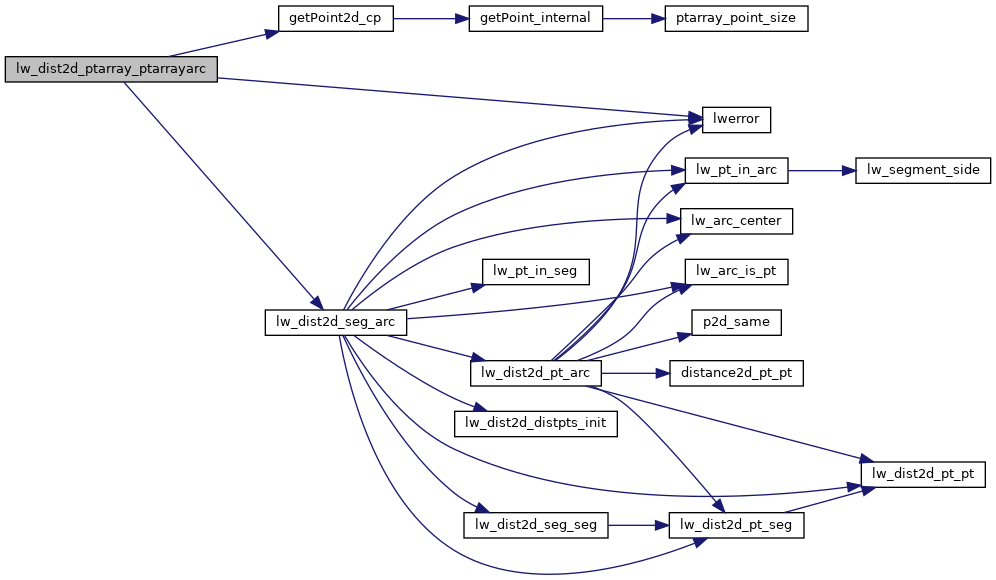
References DIST_MAX, DIST_MIN, DISTPTS::distance, getPoint2d_cp(), lw_dist2d_seg_arc(), LW_FALSE, LW_TRUE, LWDEBUGF, lwerror(), DISTPTS::mode, POINTARRAY::npoints, DISTPTS::tolerance, and DISTPTS::twisted.
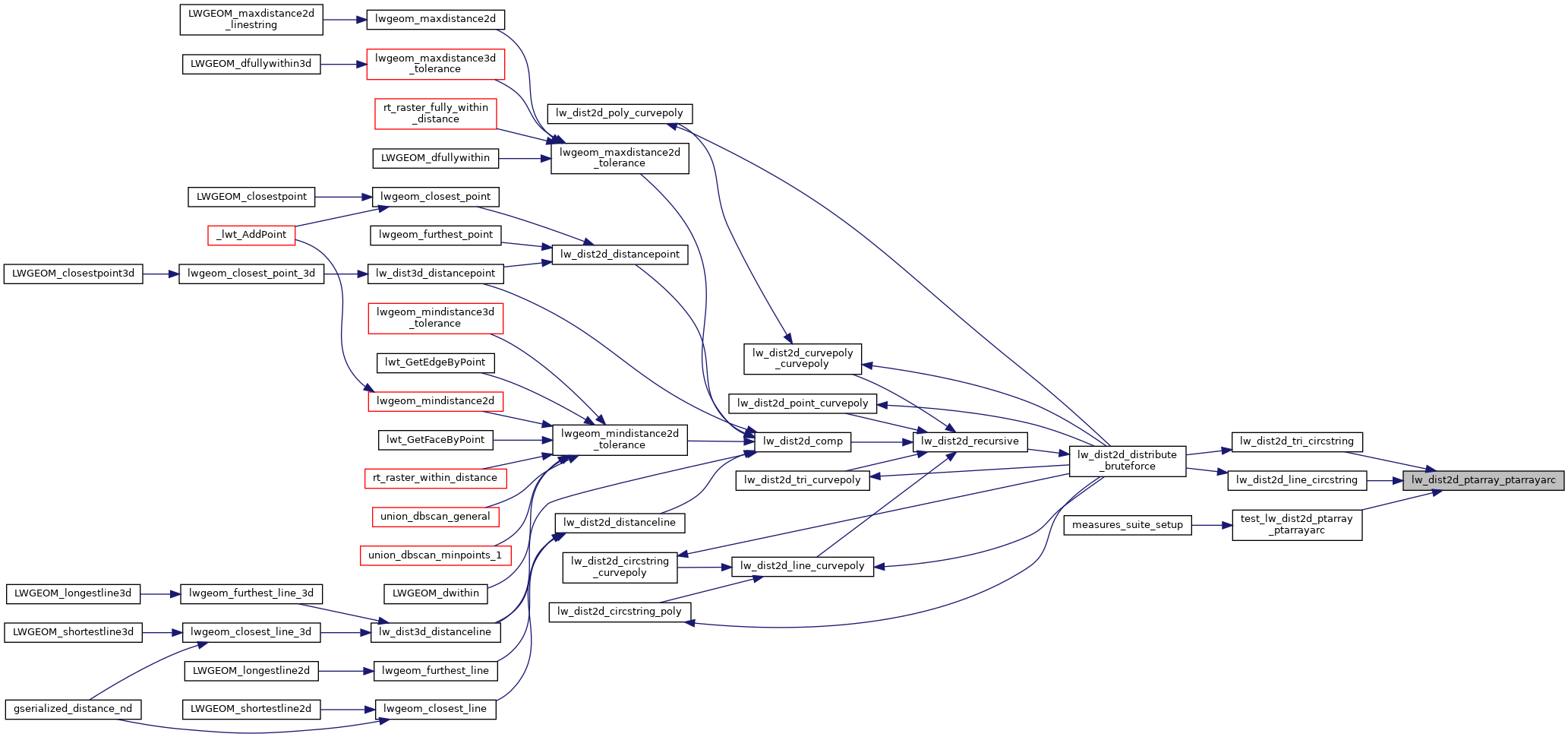
Referenced by lw_dist2d_line_circstring(), lw_dist2d_tri_circstring(), and test_lw_dist2d_ptarray_ptarrayarc().
Here is the call graph for this function:
Here is the caller graph for this function: