Loading...
Searching...
No Matches
◆ gbox_get_sortable_hash()
| uint64_t gbox_get_sortable_hash | ( | const GBOX * | g, |
| const int32_t | srid | ||
| ) |
Return a sortable key based on the center point of the GBOX.
Definition at line 893 of file gbox.c.
894{
895 union floatuint {
896 uint32_t u;
897 float f;
898 };
899
901
902 /*
903 * Since in theory the bitwise representation of an IEEE
904 * float is sortable (exponents come before mantissa, etc)
905 * we just copy the bits directly into an int and then
906 * interleave those ints.
907 */
909 {
910 GEOGRAPHIC_POINT gpt;
911 POINT3D p;
915 normalize(&p);
916 cart2geog(&p, &gpt);
917 /* We know range for geography, so build the curve taking it into account */
920 }
921 else
922 {
925 /*
926 * Tweak for popular SRID values: push floating point values into 1..2 range,
927 * a region where exponent is constant and thus Hilbert curve
928 * doesn't have compression artifact when X or Y value is close to 0.
929 * If someone has out of bounds value it will still expose the arifact but not crash.
930 * TODO: reconsider when we will have machinery to properly get bounds by SRID.
931 */
932 if (srid == 3857 || srid == 3395)
933 {
936 }
937 else if (srid == 4326)
938 {
941 }
942 }
943
945}
void cart2geog(const POINT3D *p, GEOGRAPHIC_POINT *g)
Convert cartesian coordinates on unit sphere to spherical coordinates.
Definition lwgeodetic.c:414
Definition liblwgeom.h:387
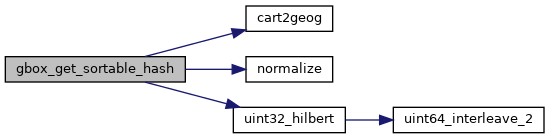
References cart2geog(), GBOX::flags, FLAGS_GET_GEODETIC, GEOGRAPHIC_POINT::lat, GEOGRAPHIC_POINT::lon, normalize(), uint32_hilbert(), POINT3D::x, GBOX::xmax, GBOX::xmin, POINT3D::y, GBOX::ymax, GBOX::ymin, POINT3D::z, GBOX::zmax, and GBOX::zmin.
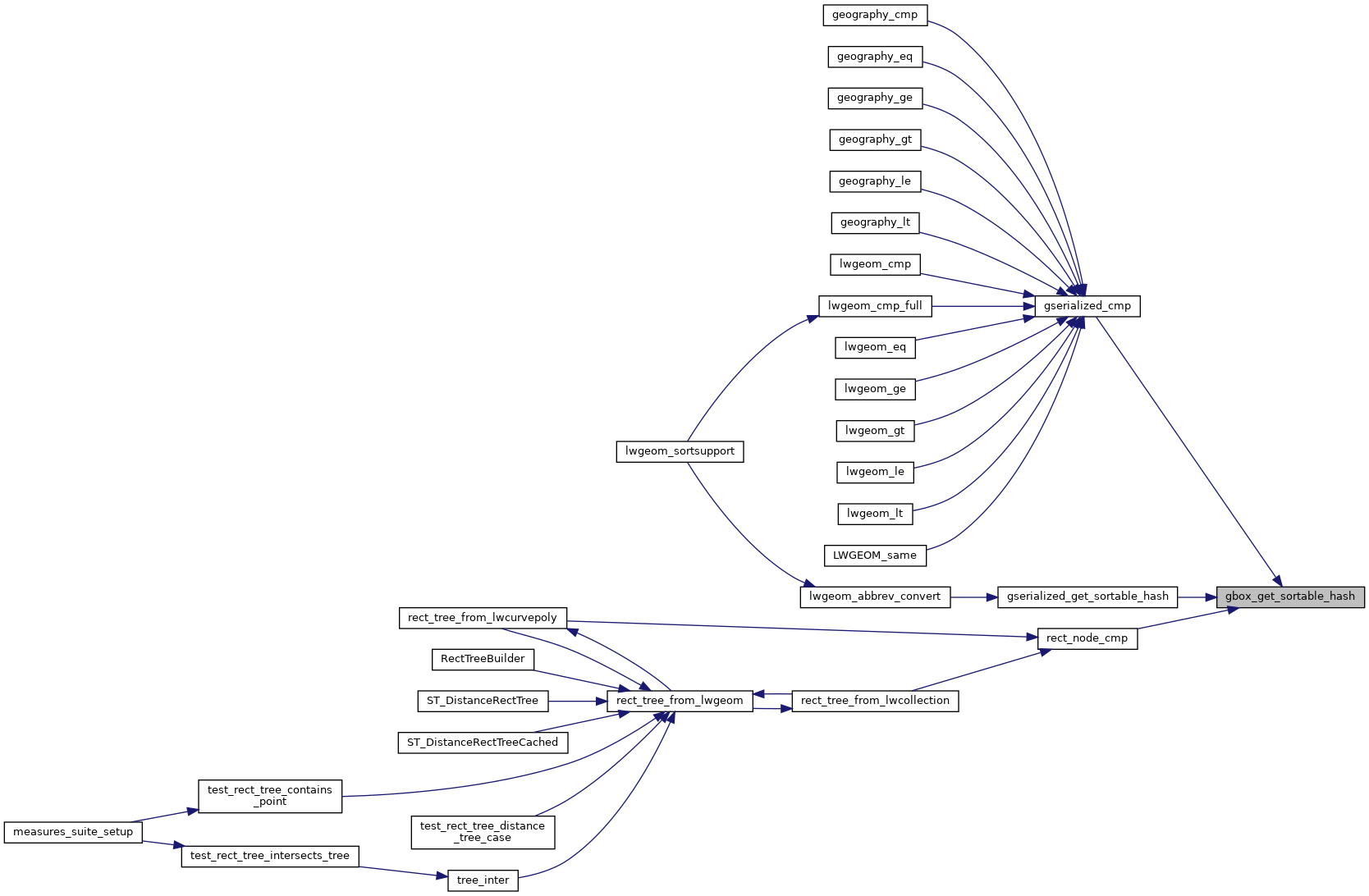
Referenced by gserialized_cmp(), gserialized_get_sortable_hash(), and rect_node_cmp().
Here is the call graph for this function:
Here is the caller graph for this function: