Loading...
Searching...
No Matches
◆ lw_arc_calculate_gbox_cartesian_2d()
| int lw_arc_calculate_gbox_cartesian_2d | ( | const POINT2D * | A1, |
| const POINT2D * | A2, | ||
| const POINT2D * | A3, | ||
| GBOX * | gbox | ||
| ) |
Definition at line 453 of file gbox.c.
454{
455 POINT2D xmin, ymin, xmax, ymax;
456 POINT2D C;
457 int A2_side;
458 double radius_A;
459
461
462 radius_A = lw_arc_center(A1, A2, A3, &C);
463
464 /* Negative radius signals straight line, p1/p2/p3 are collinear */
465 if (radius_A < 0.0)
466 {
472 }
473
474 /* Matched start/end points imply circle */
476 {
482 }
483
484 /* First approximation, bounds of start/end points */
489
490 /* Create points for the possible extrema */
499
500 /* Divide the circle into two parts, one on each side of a line
501 joining p1 and p3. The circle extrema on the same side of that line
502 as p2 is on, are also the extrema of the bbox. */
503
504 A2_side = lw_segment_side(A1, A3, A2);
505
508
511
514
517
519}
double lw_arc_center(const POINT2D *p1, const POINT2D *p2, const POINT2D *p3, POINT2D *result)
Determines the center of the circle defined by the three given points.
Definition lwalgorithm.c:229
int lw_segment_side(const POINT2D *p1, const POINT2D *p2, const POINT2D *q)
lw_segment_side()
Definition lwalgorithm.c:65
Definition liblwgeom.h:375
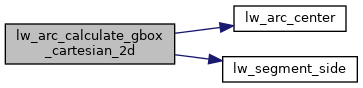
References FP_MAX, FP_MIN, lw_arc_center(), lw_segment_side(), LW_SUCCESS, LWDEBUG, POINT2D::x, GBOX::xmax, GBOX::xmin, POINT2D::y, GBOX::ymax, and GBOX::ymin.
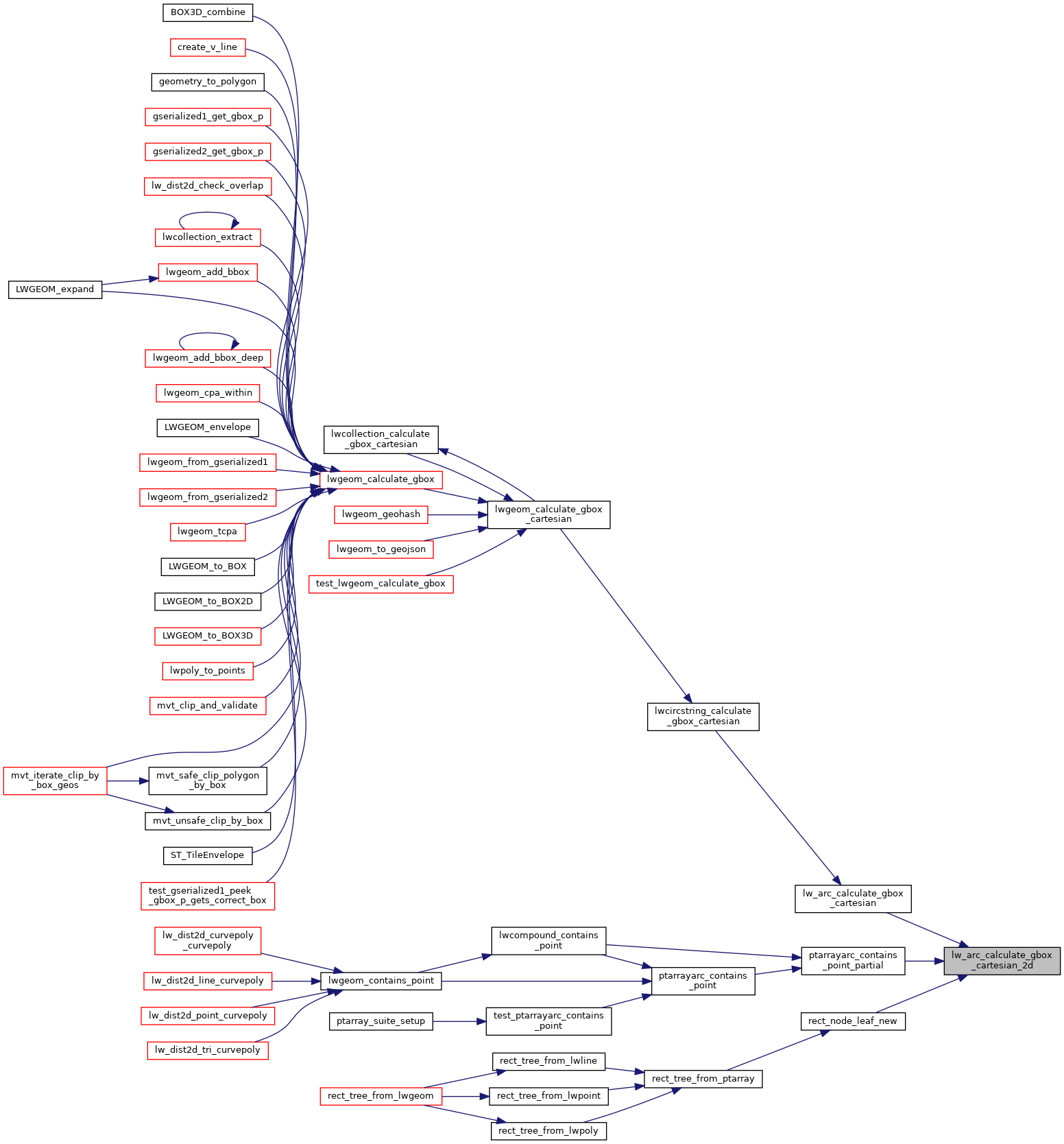
Referenced by lw_arc_calculate_gbox_cartesian(), ptarrayarc_contains_point_partial(), and rect_node_leaf_new().
Here is the call graph for this function:
Here is the caller graph for this function: